M1の安藤弘晃です.
9月10日〜11日にリモートで開催されたIWIN2020にて発表を行いましたので,報告します.
Ando, H., Iwatsuki, Y., HIbi, D., Tsutsui, K., Aoki, S., Naito, K., Chujo, N., Mizuno, T., Kaji, K., Anomaly detection in FA equipment using an interaction model, International Workshop on Informatics(IWIN2020), 2020.
この発表でExcellent Paper Awardを受賞しました.
研究概要
Machine learning is being investigated as a promising method for detecting anomalies.
Studies have proposed a method for detecting anomalies in equipment by searching for data that identifies equipment anomalies by arranging sensors in the equipment.
However, this method requires a large number of sensors and is, therefore, expensive to purchase and install.
In this research, we introduce a less costly method that does not use a large number of sensors.
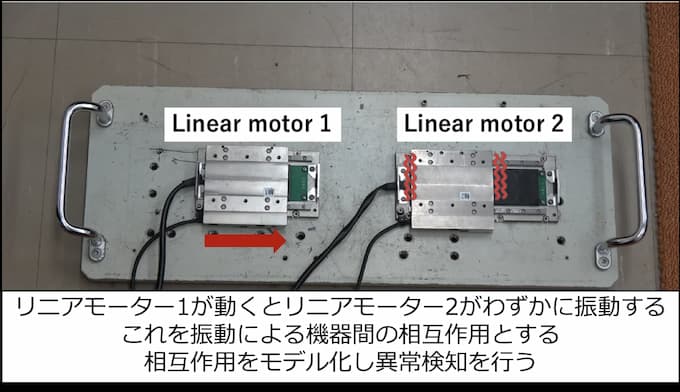
Factory Automation (FA) involves a lot of equipment and, when in operation, the machines are affected by the interaction between this equipment, specifically, the sounds, vibrations, and heat.
We believe it is possible to detect equipment anomalies and reduce cost by modeling the vibrations caused by this interaction when the equipment is in its normal state and comparing it with its anomalous state.
In this study, we collected normal and anomaly data, modeled interaction, and conducted evaluation experiments.
We used the coefficient of determination for anomaly detection to compare the normal data model with the anomaly data.
感想
初の国際学会で英語での発表はとても緊張しました.
自分の前の人のスライドトラブルによって発表の順番が繰り上がるアクシデントなどがありましたが,無事に発表することができました.
論文はIWIN2020のExcellent Paper Awardに選んでいただけたのもとても嬉しかったです.
オンラインでの発表だったのが残念ですがとても良い経験ができました.