DICOMO2020にて「車輪に取り付けたBLEビーコンによる車椅子移動認識手法」というタイトルで発表してきました.
大鐘勇輝, 水野涼雅, 榎堀優, 梶克彦, 車輪に取り付けたBLEビーコンによる車椅子移動認識手法 マルチメディア,分散,協調とモバイル(DICOMO2020)シンポジウム, 6E-2, pp.1061-1070, 2020.
発表概要
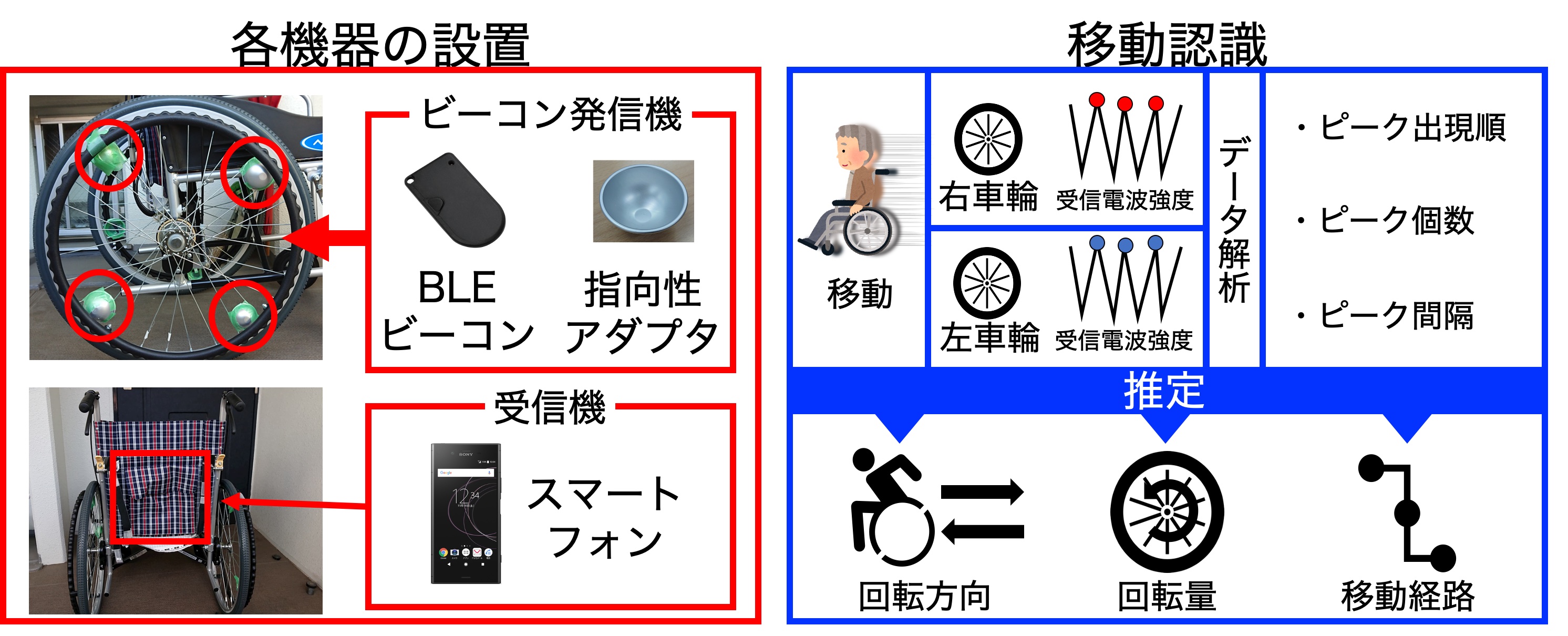
医療技術の発達により人の寿命は年々伸び,WHO(世界保健機関)はこれからは単に寿命を延ばすのではなく,健康寿命を延ばしていくのが大切だと提唱している. 健康寿命を延ばす重要な要素の1つとして運動があり,それを知る指標として歩数を確認する方法が挙げられる. しかしながら,歩数は自立して歩ける人のみに適用できる指標であり,車椅子使用者ではこの指標を用いた運動量の推定は行えない. これまで車椅子における移動認識の先行研究として,GPSを用いた手法や加速度,角速度,地磁気を用いた手法など様々な手法が提案されてきた. しかし,これらの手法は高精度な位置推定に焦点を当てているため導入コストが高く,一般の人では運用が難しい. こで本研究ではBLEビーコンを用いて,低コストで導入・運用が行える移動認識手法を提案する. 本手法は車椅子にBLEビーコンを取り付け,状態によって変化するBLEビーコンの電波強度をもとに移動認識を行う. この時,取得したデータには様々なノイズが載っているため,複数のデジタルフィルタを適用しノイズの軽減を試みる. そして,ノイズを軽減したデータから車輪の回転数や回転方向を推定し,移動を推定していく. 上記の手法を用いてテスト環境で車椅子の移動認識精度を確かめた. その結果,車輪の回転数推定は100%,前進・後進推定は100%・98.5%の精度で推定できた. また移動経路推定は,長方形の周りを1周する移動,スラロームの動き,円の周りを1周する移動の3種類で実位置との誤差を比較し評価を行なった. その結果,それぞれの移動における平均推定誤差は13.95m,6.75m,6.51mであった.
報告と感想
こんにちは. B4の大鐘勇輝です. 6月24日(水)~6/26日(金)の日程で開催されたDICOMO2020において研究発表を行ってきましたので,報告させていただきます. 今回の発表では「車輪に取り付けたBLEビーコンによる車椅子移動認識手法」というタイトルで,BLEビーコンを用いた車椅子の移動認識に関する研究を発表させていただきました. これは以前,情報処理学会第82回全国大会で発表した「車輪に取り付けたBLEビーコンによる車椅子移動認識の基礎検討」から更に研究を深めたもので,実際に移動推定が行えるところまで進めたものになります. 残念ながら今年はコロナウイルス流行の影響でDICOMO史上初のオンライン開催となり,DICOMOの特徴でもある温泉地での開催が叶いませんでした. しかしながら,発表自体には大きな問題はなく,無事に終えることができましたので,ある意味で貴重な経験を得ることができました. 発表の結果,賞を取ることはできませんでしたが,より研究を進化させまた来年リベンジしたいと考えています.
DICOMOでのアルバイトについて
今回のDICOMO2020では発表者としてではなく,アルバイトとして裏方の仕事もさせて頂きました. 仕事内容は通常ですと会場の設営といった肉体労働ですが,今年は前述の通りオンライン開催ですので,主に発表時のタイムキーパーがメインの仕事でした. タイムキーパーは指定された時間にベルの音を流すといった単純な作業ですが,Zoom側の仕様で人間の声以外の音はノイズと見なされカットされてしまい,他の人にベル音が届かないという問題が発生しました. そこで急遽,人の声で経過時間を録音したものに差し替え,なんとか対処しました. オンライン発表での知見が少なく,最初はバタバタとしましたが2日目,3日目と経つにつれて次第に安定していき,無事に終えることができました. バイトを取り仕切っていた金沢工業大学の徳永雄一先生からも「今回,この会議が成功したことに,皆さんの貢献は非常に大きく,情報処理学会史上に救世主メンバーとして語り続けられることになるのではないかと思います.」とコメントを頂けたので非常に嬉しく思いました. コロナ禍のこの頃,様々な変化に適応していく必要がありますが,今回の経験を活かして頑張っていこうと思います.