研究室見学について
研究室見学を希望の方は下記のメールアドレスにて日程調整します.
kaji[at]aitech.ac.jp

正式な研究室名は行動情報科学研究室です.行動をセンシングし,行動をデザインする研究室です. スマートフォン等の各種センサを用いた屋内位置推定・行動認識技術の追求と,それに基づいた人間拡張や行動変容に資するシステムの実現を目指します
研究室見学を希望の方は下記のメールアドレスにて日程調整します.
kaji[at]aitech.ac.jp
以下は現在使用している技術スタックの一例です.
梶研究室では研究の必要に応じて学ぶというスタンスです.
情報系の企業に就職したときに困らないレベルの総合力を身につけてもらうのを目的に指導している研究室です. ここで言う総合力とは,主体性,問題発見,問題細分化,問題解決,プログラミング,プレゼン,議論・コミュニケーション,文章,スケジュール管理,あたりです. 研究活動にはこれらすべてが含まれます.
DICOMO2026にて発表を行いました
2026年6月26日

2026年の新規メンバー歓迎会を行いました
2026年5月27日

論文誌に2本収録されました!
2026年5月15日

3年生が配属されました!!
2026年5月12日

梶研を見守る恐竜
2026年3月24日

卒業生を追い出しました
2026年3月20日

MRひっぱるーむ:現実空間をゲームの要素として活用するMR ゲーム
2026年
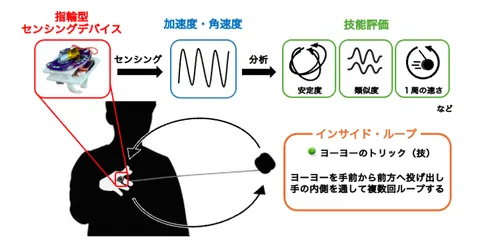
指輪型センシングデバイスを用いたヨーヨーの技能分析システム
2026年
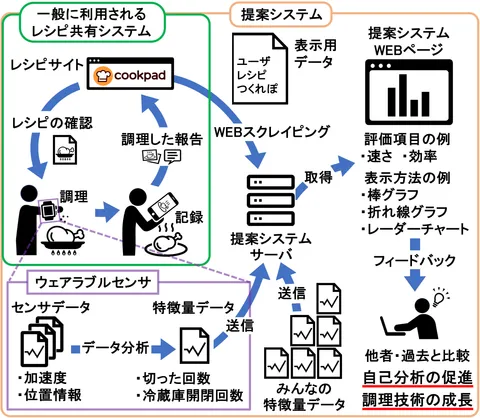
ウェアラブルセンサを用いた調理動作共有比較分析Webシステムに関する研究
2026年
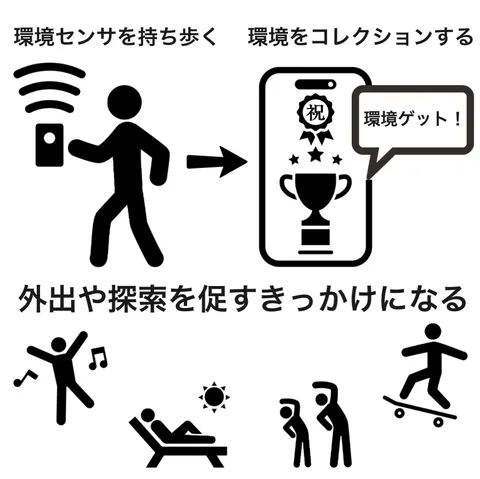
多様な環境の体験を促すスマートフォンアプリに関する研究
2026年
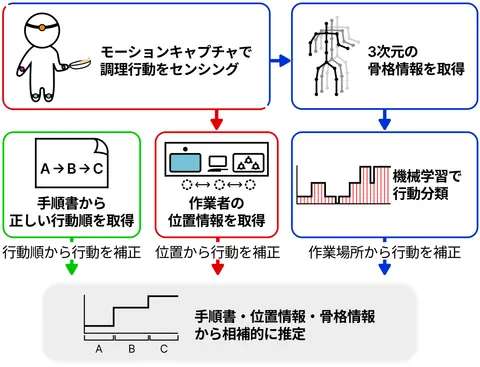
3次元の骨格情報と位置情報と手順書を相補的に用いた調理行動の分類精度向上手法
2026年
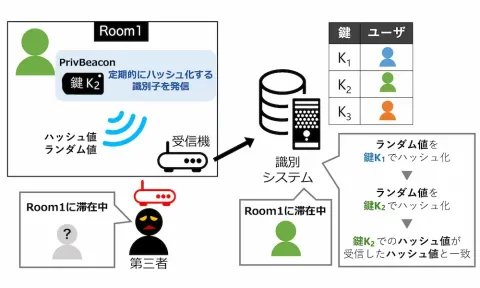
PrivBeacon:プライバシを考慮した携帯型BLEビーコンデバイスとその識別システム
2026年
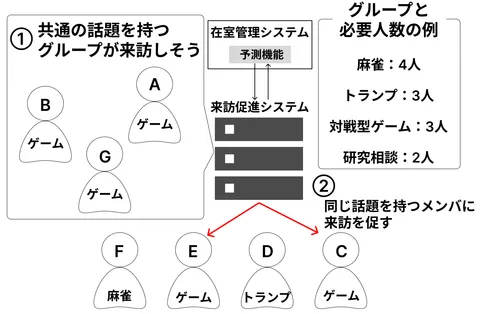
人の行動予測を用いたコミュニケーション支援に関する研究
2026年
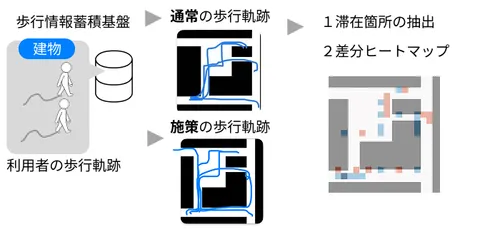
屋内施設の滞在状況の変化を可視化する滞在比較システムに関する研究
2026年
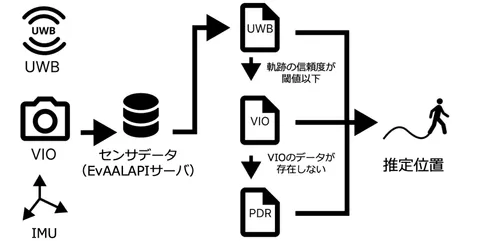
UWB・VIO・PDR の切り替えによる屋内位置推定に関する研究
2026年
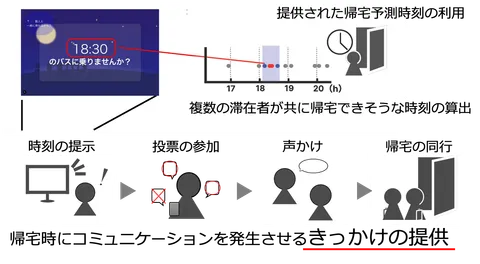
在室予測に基づく帰宅同行支援システムに関する研究
2026年
phoneSynth: スマートフォンの姿勢変化で操作する演奏機能の分離された楽器アプリケーション
2026年
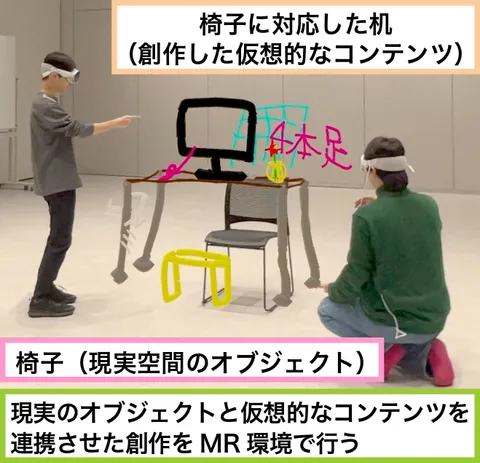
同一現実空間での仮想的なコンテンツの共創を支援する複合現実システムに関する研究
2026年
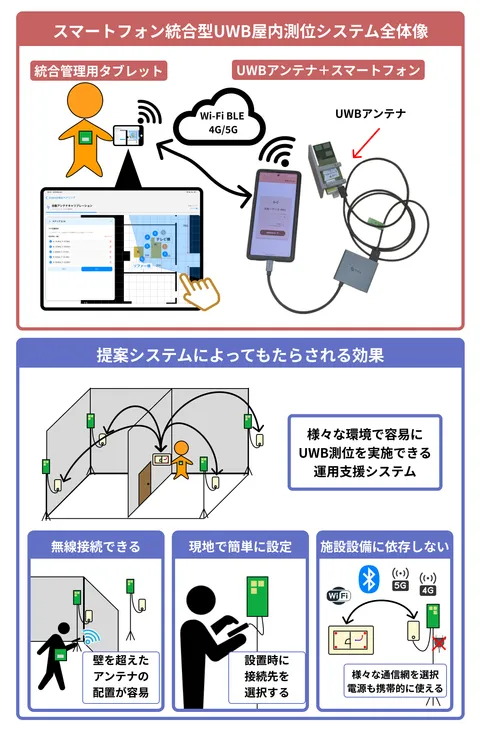
UWBアンテナとスマートフォンの融合により配置の柔軟性を向上させた屋内測位システム
2026年
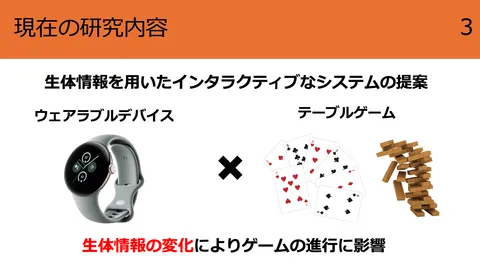
⽣体情報を活⽤したインタラクティブシステムの研究
2026年